Moteur électrique asynchrone
triphasé, dont le Stator ne possède pas le nombre d’encoches, permettant un
pas polaire entier.
Ce type de
moteur, a été conçu selon les principes de réalisation des rotors de moteur
à courant continu.
C’est-à-dire, que le nombre d’encoches et tel, que le calcul polaire n’est
pas un nombre entier.
On rappelle que le pas polaire correspond au nombre d’encoches présents sous
l’influence d’un pôle.
Un exemple :
un moteur 45 encoches, quatre pôles dont ne rend pas polaire égal à 11,25.
Ce type de moteur, présente la particularité d’avoir pour chaque phase, un
nombre de petites bobines ou de sections strictement identiques. Ce qui
permet une réalisation plus rapide.
Chaque phase sera constituée d’enroulements strictement identiques.
Chaque enroulement peut être constitué de plusieurs groupes d’enroulements
en parallèle. Chaque enroulement comportera un certain nombre de sections en
série.
Pour l’exemple :
moteur de 45 encoches comportera 15 sections ou petites bobines, par phase.
Il pourrait y avoir :
·
Un enroulement unique
comportant 15 sections en série, par phase (1)
·
Un enroulement
composé de trois groupes parallèles de cinq bobines (2) disposées en série.
·
Un enroulement
composé de 15 bobines, toutes en parallèle (3).
(2)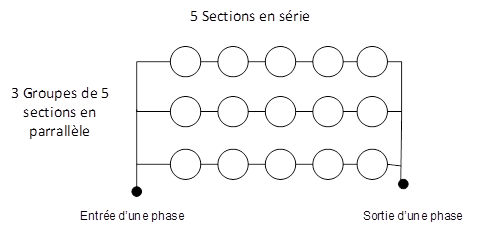
Adapté
aux fortes intensités et faibles et tensions (les fils resteront de
faibles sections du fait du partage des courants en //)
(3)
(3) 
Adapté aux fortes tensions et faible intensité
(Petites section des fils).
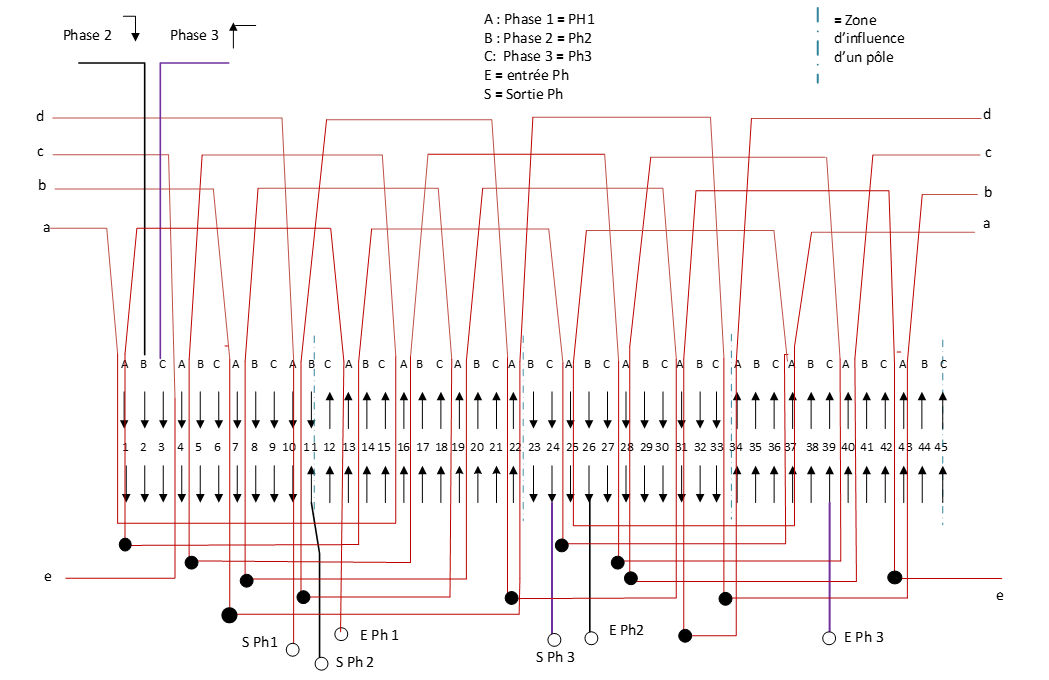
Remarque importante : Les groupes série seront généralement constitués en effectuant
des connections de type « Entrée-sortie-sortie-entrée »
Dans le cas de
moteur de ce type, le pas polaire ne peut pas être entier.
Compte
tenu de la présence de nombre d’encoches non divisibles par le nombre de pôles,
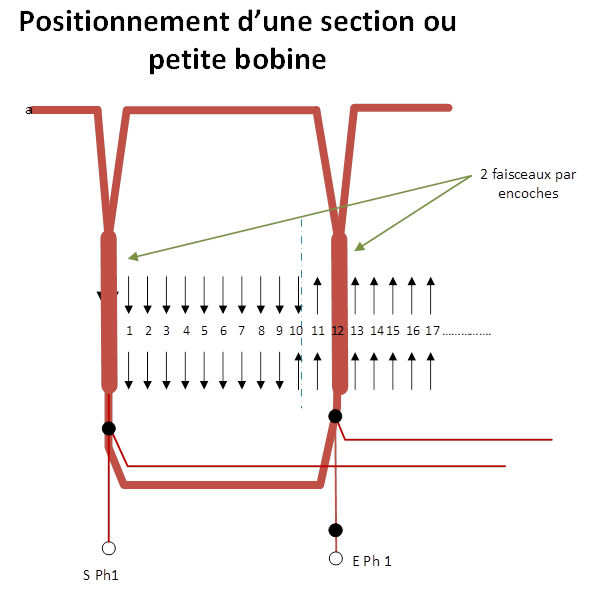
il conviendra que les petites bobines ou sections, soit positionnées avec un
écart d’encoches dont le nombre sera suffisamment supérieur au pas polaire.
(Nous
rappelons que le pas polaire égal le nombre d’encoches divisées par le nombre
de pôles).
Un exemple : pour un 45 encoches et quatre pôles, le pas polaire ne pas être entier et sera égal à 11,25 (n = valeur entière = 11)
Si l’on positionne une petite bobine, il
conviendra que celle-ci ait un écartement suffisant pour occuper au minimum n+1
= 12 encoches, pour être sûr de se trouver dans la zone d’influence de pôle
opposé à celui de la première encoche.
Si
le moteur est triphasé, alors l’écartement pourra être à n+2 = 13
L’emplacement de chacune des phases sera identique à celle de tous les moteur triphasés : Phase 1 ; Phase 2 ; Phase 3, Phase 1 ;……..
Ce
qui sous-entend que si l’on continue les connexions série, entrée-sortie-sortie-entrée,
on sera obligé de repasser au minimum deux fois dans les mêmes encoches.
Avantages :
Ce type de bobinages présente certains avantages au point de vue de la réalisation :
Toutes les petites bobines sont strictement identiques. Il n’y a pas de bobines concentriques.
Il
faut repasser deux fois sur les mêmes encoches, mais avec les machines
automatisées, cela est relativement facile.
En ce qui
concerne les entrées et les sorties des phases, cela est du domaine du
classique :
Les entrées se feront à approximativement un tiers des encoches occupées.
Si nous conservons l’exemple du « 45 encoches », en triphasé, cela signifiera, que l’entrée d’une phrase s’effectuera à 15, ou 16 encoches. Selon le principe utilisé par les Français : Bleu-Blanc-Rouge,pour les positions!
Les sorties s’effectueront elle aussi à un tiers des encoches, selon le final phase par phase.
Chaque phase
sera strictement identique aux deux autres. Mais décalée.
Inconvénients
de ce type de moteur :
Il est possible qu’il y ait surconsommation, du fait du non-respect absolu de la notion de pas polaire.
Il
est aussi possible qu’il y ait impossibilité de se servir de ce type de moteur
à monde hyper synchrone, c’est-à-dire pour produire de l’énergie.
Ceci étant dit, ce type de moteur l’expression montre de manière claire nette et précise, l’importance de la recherche et de
la trouvaille de nouveautés.
Moteur 45 encoches triphasé 4 pôles sections en parallèle. (Une seule phase pour éviter la surcharge visuelle.)
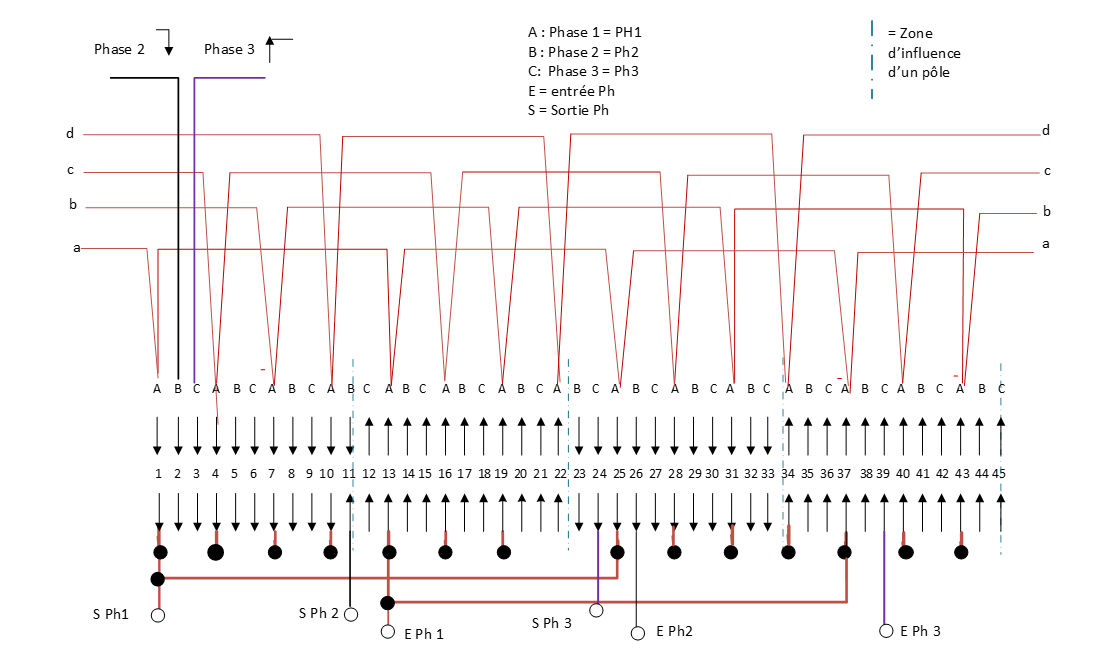
Moteur 45 encoches triphasé 4 pôles sections en série. (Une seule phase pour éviter la surcharge visuelle.)
Complément :
Les schémas présentés
sont simplifiés et normalisé à la section. C’est-à-dire que les sections ne
sont pas intégralement représentées afin de ne pas surcharger le schéma.
Autrement, une
seule section aurait l’apparence du schéma ci-dessous.