Avertissement.
Ce cours est à destination de professionnels qui
veulent être informés de cette amélioration technique.
Il a surtout but de vulgariser les principes de
réalisation et de conception.
C’est à dire que souvent, je parle d’une
« Madame k », constante de son état, qui, du fait de l’utilisation du
magnétisme, se trouve omniprésente.
Les calculs complets devraient se servir des
notions de Réluctance, qui correspond à la loi d’ohms, en gros pour le
magnétisme.
Comme le but de cet ouvrage n’était pas de
réinventer ce qui existe déjà, les notions de mathématiques et de physiques
sont je l’espère épurées au maximum.
Les puristes seront mécontents, certes ! Ceux
qui veulent connaître (et vite), car un chantier les attend, le seront
satisfaits, j’espère. C’est uniquement ce qui m’a préoccupé, dans la rédaction
de ce cours.
D’autant plus, qu’après la lecture de tout cela,
qui dit que certains ne seront pas tentés de reprendre des études ?
Attention, ils se rappelleront, peut-être, de la
différence entre la réalité de laboratoire et celle constatée.
Peut-être reconnaitront-ils la présence de
« Madame k »
Qu’ils la saluent de ma part, c’est une femme
charmante !

Quelques
adresses de travail
(La mienne, Mistershoeélec)
http://www.infolytica.com/fr/coolstuff/ex0072/
http://fr.wikipedia.org/wiki/Machine_%C3%A9lectrique#Les_moteurs_sans_balais
http://www.stielec.ac-aix-marseille.fr/cours/abati/axem.htm
http://stielec.ac-aix-marseille.fr/cours/abati/synch.htm#Brush
http://pagesperso-orange.fr/f5zv/RADIO/RM/RM23/RM23B/RM23B12.html
http://fr.wikipedia.org/wiki/Aimantation
Pour les autres adresses, je remercie le
travail fait et les présentations récupérés, ou qui m’ont inspirées.
Grand merci aussi, pour tous les
renseignements fournis.
Par contre, je vous conseillerais de
faire toujours attention, aux petites erreurs, surtout dans la
présentation de formules et les animations. Sur certain sites, des termes ont
étés oubliés, des calculs sont plus ou moins faux, soit les animations bougent,
avec des parties (copiés-collés), qui ne sont pas à leur place.
Prudence donc !
Moteurs « à entrefer plan, axial, pas à pas, Brushless, », et
autres curiosités.
Préambule :
Ces
types de moteurs possèdent au moins, cinq points communs :
·
Ils ont un
diamètre plus important et une longueur moindre par rapport aux autres types de
moteurs.
·
L’induction
magnétique est gérée axialement pour les moteurs à « entrefer plan »
et « axiaux », de manière radiale pour les « Brushless » et
« pas à pas ».
·
Ils doivent
absolument être alimentés en courant continu, même s’il est parfois nécessaire
d’intercaler un module électronique de puissance, pour l’alimentation et le
pilotage.
·
La vitesse doit
pouvoir varier dans une grande plage.
·
Il est souvent
possible de les piloter informatiquement.
Ces moteurs furent conçus pour répondre à une première problématique de volume, jugé
souvent important pour les machines à courant continu.
L’usure des structures « collecteur et charbon » et l’entretien délicat et permanent, ont amené les
industriels et chercheurs à penser différemment la gestion et la création, des
forces mises en évidence par Laplace
Ce furent, par la suite des soucis d’accélération qui prévalurent. Certaines situations industrielles nécessitaient de
très grandes accélérations, suivies de très grandes décélérations. Les moteurs continus classiques étaient
handicapés par leur masse, leurs volumes et par leur rotor bobiné. A des
grandes vitesses, les sections sortaient de leurs encoches et pouvaient bloquer
net, le rotor.
Pour terminer, ce fut l’asservissement de position qui justifia cette catégorie de moteur. Par exemple,
pour des chaînes de montages automatisées, il était nécessaire de faire tourner
un rotor, pour qu’il arrive à un angle donné (programmable, si nécessaire), le
plus rapidement possible. Une fois l’angle désiré obtenu,
le rotor sera bloqué dans sa position, sans frein extérieur
supplémentaire. Il sera possible de choisir un angle différent, inférieur
ou supérieur, ce qui amènera le moteur à inverser son sens de rotation
ou bien , de devoir travailler à partir d’un point de repos, soumis à forces
1. Les moteurs à entrefer plan. (Axem)
Ces moteurs furent conçus pour répondre à une première problématique de volume, jugé
souvent important pour les machines à courant continu.
Ce furent, par la suite des soucis d’accélération qui prévalurent. Certaines situations industrielles nécessitaient de
très grandes accélérations, suivies de très grandes décélérations. Les moteurs continus classiques étaient
handicapés par leur masse, leurs volumes et par leur rotor bobiné. A des
grandes vitesses, les sections sortaient de leurs encoches et pouvaient bloquer
net, le rotor
L’usure des structures « collecteur et charbon » et l’entretien délicat et permanent, ont amené les industriels
et chercheurs à penser différemment la gestion et la création, des forces mises
en évidence par Laplace.

Principe :
Les lois de Laplace concernant la création de
forces électromagnétiques ont été
pensées différemment.
L’induction « B » est disposée
axialement.
Il y aura création d’un couple de forces électromagnétiques, permettant la
rotation d’un disque, si ce dernier possède des conducteurs placé perpendiculairement
à l’axe et traversé par une intensité.
Comme le conducteur doit se déplacer du fait de la
rotation,
un autre va le remplacer.
L’alimentation de ces conducteurs ne se fait
pas par une structure « collecteur et charbon », mais par une structure de
bagues lisses et/ou u peignes d’alimentation. Une alimentation avec une cuve de
mercure (conductrice) a été utilisée par l’ancêtre de ce type de moteurs. Ce
n’est plus le cas aujourd’hui.
Le magnétisme est réalisé avec des paires d’aimants
permanents, ce qui annule les pertes
joules provoquées par l’excitation des électroaimants et qui sont constatées,
dans les moteurs « classiques ».
|
|
|

l est possible de doubler le couple, en positionnant un balai
ou charbon pour obtenir une force supplémentaire qui sera le pendant à la force
crée par le brin actif représenté. C’est ce qui est fait le plus souvent !
Cela supprime tout balourd dans la création de l'effort et au point de vue électrique,
il y a deux spires en parallèle !
Les balais, ou charbon, ou encore peigne,
doivent frotter à la fois sur une lame de cuivre circulaire et sur des lames
verticales. Pour éviter une forte usure (comme celle constatée sur des moteurs à
collecteur et charbons radiaux), les creux sont comblés avec une résine. Une
structure de rattrapage de jeu est cependant nécessaire.
Il n’y a pas à proprement parler de bobinage
filaire, seule
une plaque de circuit imprimé officie comme telle.
La résistance d'induit est pratiquement nulle. Seuls les phénomènes
électromagnétiques seront pris en
compte. Le rendement sera excellent et il sera pratiquement exact de dire que :
·
P absorbée @ P électrique fournie au disque.
·
U x I @ E x I
·
U @ E
La machine est réversible, c’est à dire qu’il est
possible de s’en servir comme génératrice.
Formules de physique mises en jeu.
![]()
Pour
connaître E’ moyen = - (E’ en volt) = force contre électromotrice.
Il conviendra de :
·
N'utiliser cette règle que pour un seul
conducteur gravé sur le disque rotor. (Il est impossible d'insérer ou de graver
une bobine)
·
S'il y a un deuxième conducteur utilisé,
celui-ci est en parallèle. La formule s'appliquera telle quelle.
·
Il conviendra de connaître l'induction
disponible fournie par les aimants. (c'est le plus difficile) Comme il y a deux
aimants identiques, si l'une est connue l'autre le sera aussi. L'induction
totale sera le double de celle produite par un aimant.
·
F
= Produit scalaire de B
par la Surface parcourue. B est
constant, par contre, S sera fonction du temps. La variation de S se calculera
ainsi :
Pour
connaître le couple C en Newton mètre.
La
formule de Laplace sera nécessaire :
C
= Rayon du rotor x B x I x L x sin (angle entre I et B) s’il n’y a qu’une lame alimentée
C
= 2 x Rayon du rotor x B x I x L x sin
(angle entre I et B) si les 2 lames
sont alimentée(en parallèle)
Comme le disque est entraîné en rotation,
l’induction ne peut pas être maximale et constante. Par
contre, l’angle entre I et B reste à 90°
C = Rayon du rotor x B moyen x I x L x sin(90°) ; comme
sin(90°) =1
C = Rayon du
rotor x B moyen x I x L, pour une lame seule.
C = Rayon du
rotor x B moyen x I x L x 2, pour 2 lames couplées.
Il
sera possible d’estimer la variation relative de B en fonction de l’éloignement
des lames, en constatant que celle-ci est produite par la décomposition de B en
2 composantes vectorielles.
Ce qui amènera la variation de Br suivante, en fonction de l’angle
parcouru.
L’écart d’angle de calculera en effectuant
le rapport : 360° / nombre de lames.
L’écart d’angle
= 2 x a
a = 360° / nombre de lames / 2
B moyen sera approximativement égal à
B moyen = (B maximum + B maximum x cos (a))/2
(Compte tenu de la petitesse de l’angle la différence avec la
rigueur d’un calcul intégral de moyenne sera des plus minimes)
Le couple deviendra
C = Rayon du rotor x
(B maximum + B maximum x cos (a)) / 2 x I x L
Ou
C = Rayon du rotor x
(B maximum + B maximum x cos (a)) / 1 x I x L (s’il n’y a qu’une lame alimentée)
La puissance sur le rotor.
P utile = 2 x p x n x C
Pu =2 x p x n x Rayon du rotor x B moyen x I x L, pour une lame seule.
Ou
Pu =2 x p x n x Rayon du rotor x B moyen x I x L x 2, pour 2 lames couplées
Si l’on admet que U @ E et que Pabsorbée @ Pélectrique transmise @ Putile ; l’expression de la force contre électromotrice E’,
deviendra, par comparaison :
E x I @ Pu =2 x p x n x Rayon du rotor x B moyen x I x L @
U x I
(Pour
les rotors à une seule lame couplée)
Ou
E x I @ Pu =2 x p x n x Rayon du rotor x B moyen x I x L x 2 @
U x I
(Pour
les rotors à 2 lames couplées)
Ce qui au final amène par simplification
avec I
E @ U @ 2 x p x n x Rayon du rotor x
B moyen x L
(Pour les rotors à une seule lame couplée)
E@ U @ 2 x p x n x Rayon du rotor x
B moyen x L x 2
(Pour les rotors à 2 lames couplées)
Pour la vitesse, il suffira de faire le
rapport.
n @ U/(2 x p x Rayon du rotor x B
moyen x L)
n @ E/(2 x p x Rayon du rotor x B
moyen x L)
(Pour les rotors à une seule lame couplée)
Ou
n @ U/(2 x p x Rayon du rotor x B
moyen x Lx2)
n @ E/(2 x p x Rayon du rotor x B
moyen x Lx2)
(Pour les rotors à une seule lame couplée)
Il est à remarquer que la vitesse va varier
inversement et proportionnellement avec l’induction. (Comme pour les machines à
courant continu classiques)
Avantages et inconvénients de ce
type de structures.
Le moteur est à courant continu.
Il est possible de faire varier la vitesse, grâce à un variateur de tension du
type « Rectivar ».
Le couple fourni sera directement
fonction de l’induction de la tension d’alimentation.
Le moteur ne peut pas caler,
brutalement, comme les moteurs asynchrones. Par contre le moteur peut ralentir en fonction du couple résistant
imposé.
Certains constructeurs intègrent une
dynamo tachymétrique sur l’arbre moteur, en vue de faire d’asservir la vitesse
du moteur.
Il n’est pas possible d’agir sur
l’induction car, il n’y a pas de bobinage d'excitation. De ce fait, il n’y a
aucun risque de voir ce type de moteur s’emballer suite à une rupture de
production de flux.
Il n’y a pas de pertes joules
inducteur.
Il n’y a pas de masse ferreuse
importante au rotor, certains sont même réalisés en matières plastique. Ceci
entraînera une constante de temps électrique faible (L/R) Le moment d'inertie
sera très faible ; la constante de temps mécanique est très faible. Les
accélérations et décélérations pourront être très fortes.
Le moteur sera plus large que long.
Il sera en volume brut, de taille moins importante et beaucoup plus léger que
ses confrères utilisant le principe d’excitation radiale.
Du fait de la disposition des conducteur et des peignes, il y aura très faible
réaction d'induit.
L’inversion pourra se faire par
inversion directe de la tension d’alimentation. Il n’est pas possible
d’utiliser ce type de moteur en mode « universel ». L’alimentation en
courant alternatif est donc proscrite.
Les intensités dans l’induit seront
très fortes. Les densités de courant dans le bobinage (circuit imprimé) aussi.
Comme les espaces sont limités, les
écoulements thermiques ne seront pas facilités, ce qui ne permet pas au moteur
de tolérer des surcharges trop longues.
Remarque importante (dixit les constructeurs)
« Le démontage du moteur a pour
conséquence une désaimantation. Cette opération est donc à proscrire, lorsqu'on
ne dispose pas du matériel nécessaire à une ré aimantation du moteur après
remontage. »
Télécharger une notice :
http://www.stielec.ac-aix-marseille.fr/cours/abati/datasheet/axem.pdf
2.
Les moteurs de flux
axiaux.
Ces moteurs furent conçus pour répondre à une première problématique de volume, jugé
souvent important pour les machines à courant continu.
Ce furent, par la suite des soucis d’accélération qui prévalurent. Certaines situations industrielles nécessitaient de
très grandes accélérations, suivies de très grandes décélérations.
Il existe deux types de modèles, fondamentalement identiques : une source de magnétisme fixe est
mise en confrontation avec une source de magnétisme tournante.
Soit
le rotor est constitué d’électroaimant, constitués de bobines avec noyau.
Soit, il n’y a que
des bobines, sans noyau. Ces dernières présentent une inertie moindre
qui permet des accélérations extrêmes.
Les bobines peuvent comporter plusieurs spires, mais
comme les force-contre électromotrice sont importantes, elle sont le plus
souvent constituée de barreaux conducteurs uniques. Ce qui augmente la solidité
de l’ouvrage aux forces centrifuges.
Il y a un nombre
pair d’aimants permanents. Le plus souvent le nombre est deux !
(Ce n’est pas une obligation.
Une commutation de l’alimentation des bobines
est nécessaire. Elle s’effectuera de manière
automatique par un jeu de lames d’alimentation, disposées de
manière à créer un flux magnétique qui permettra l’attraction
du rotor par un des aimants permanents du stator. Quand celle-ci
sera optimale, l’alimentation
cessera, par contre une deuxième bobine
prend le relais et ainsi de suite.
Ce type de moteur ne permet pas l’asservissement de position. Il tourne en permanence.
La vitesse dépendra de la tension d’alimentation des bobines.
Plus le nombre de bobine est important, plus le
moteur est souple et moins il y a de saut, dans la création du
couple moteur.

(Photographie récupérée pour le
cours sur Infolytica) http://www.infolytica.com/fr/coolstuff/ex0072/
A.
Construction du bobinage :
Le
plus souvent le nombre d’aimants permanents opposés est 2. Il peut être supérieur, mais il sera toujours
pair !
Chaque
bobine sera le plus souvent constituée de 2 demi-barreaux soudés. Chaque demi-barreau forme un faisceau.
Le pas fait partie de la famille des « diamétraux ». C'est-à-dire que si un faisceau est face au début
d’un pôle, le deuxième faisceau constituant la section se trouve au début
immédiat du deuxième pôle, ou décalé de 1, ou 2 (pas plus). Chaque bobine est
identique aux autres.
Exemple :
Le
bobinage sera constitué d’un nombre
« G », de groupe de bobines.
Plus « G » sera important, plus le moteur sera souple, et subira peu d’à-coup.
L’angle parcouru par le rotor sera égale à 360°/nombre total de bobines (ou de
raccords) entre les bobines.
Par réalité pratique, il y aura deux faisceaux, par bobine.
Par groupe il y aura un nombre « n » de bobines, égale
au nombre de pôles. Chacune des bobines sera en série avec la précédente du
même groupe.
Les
bobines seront disposées à plan
et strictement, en avant.
L’ensemble
constituera, comme pour les moteurs à courant continu classique, un ensemble de 2 demi-groupes en
parallèle, de n/2 bobines en série, d’un groupe.
Les
connections serviront à la fois de
raccord entre faisceau et point d’alimentation.
Les
bobinages se calculeront comme
ceux des machines à courant continu classiques :
·
Soit le pas
est strictement diamétral. Dans
ce cas le nombre de bobines utiles sera égale au nombre de bobines par groupe. Chaque bobine est en parallèle. Cette solution
est utilisée si l’on veut beaucoup de couple. Le nombre de pôles est
le plus souvent 2.
·
Soit le pas
est diamétral + (quelque chose)
Dans cette optique les bobinages vont se chevaucher et la conception sera
strictement identique à celle des machines à courant continu de type
radial. Les bobines d’un groupe seront séparées en deux sous-groupes. Les bobines d’un « sous-groupe seront en série
et chaque sous groupe sera en parallèle avec l’autre.
Cette solution est utilisée si l’on veut beaucoup de variation de vitesse. Le nombre
de pôles est le plus souvent 2.
·
Il est
possible de combiner couple et vitesse en ayant 4, pôles ou plus. Si cette solution est envisagée, il faudra réaliser
des connexions. supplémentaire en augmentant le nombre de galets. Celui ci
devra être égal au nombre de pôles. Cette solution est peu ou pas utilisée, car un des objectifs de la réalisation de ce type de
moteur est de diminuer coûte que coûte, les frottements. Cette pratique nous en
éloigne.
B.
Le pas est strictement diamétral.
Les bobines sont proches, jointives et se trouvent réunies par une soudure.. Une paire de galets conducteurs assurera, ou non l’alimentation.
Un exemple :
Un moteur de 8 bobines et 2 pôles.
N
= nombres de bobines par groupe =
nombres de pôles = 2
Nombre
de groupe = nombres de
bobines / nombres de bobines par groupe
= 8/2 = 4
Les
galets d’alimentations se placeront, là où se trouvent les flèches.
Séquence :
Le
groupe précédent se déconnecte.
Le
groupe « a » va créer une paire Sud Nord. Le rotor se déplace
vers la gauche.
Le
groupe précédent se déconnecte.
Le
groupe « b » va créer une paire Sud Nord. Le rotor se déplace
vers la gauche.
Le
groupe précédent se déconnecte.
Le
groupe « c » va créer une paire Sud Nord. Le rotor se déplace
vers la gauche.
Le
groupe précédent se déconnecte.
Le
groupe « d » va créer une paire Sud Nord. Le rotor se déplace
vers la gauche.
Etc.
L’angle
parcouru entre chaque commutation sera égal
à 360°/8 = 45°
Un autre exemple :
Un moteur de 16 bobines et 4 pôles, avec connections parallèles.
N
= nombres de bobines par groupe =
nombres de pôles = 4
Nombre
de groupe = nombres de
bobines / nombres de bobines par groupe
= 16/4 = 4
Il devra y avoir 4 galets d’alimentation 2 pour le
« + » et 2 pour le « - »
Les
galets d’alimentations se placeront, là où se trouvent les flèches.
Une
connexion parallèle est nécessaire. Tout se passera comme si 2 moteurs étaient
connectés en parallèle. La puissance sera doublée par rapport à l’exemple
précèdent.
Séquence :
Elle
sera identique dans le principe. Par contre l’angle parcouru sera 2 fois plus
faible que dans le premier exemple.
C.
Le pas diamétral +
Généralement
ce sera + 1 ou +2, pas davantage pour restreindre les contraintes de positionnement
de bobinage et de cuivre. Il y aura autant de liaisons parallèles, qu’il y aura
de paires de pôles.

D.
Principes physiques et formules.
Principe de fond :
Une
bobine fixe va brutalement produire un champ magnétique de type
« continu », au voisinage d’une source d’aimantation complémentaire,
qui elle peut-être mobile.
S’il
existe un décalage de position entre les deux sources magnétiques, alors la
source mobile va être attirée selon la règle du flux maximal.
Il
sera possible qu’il y ait une répulsion, car l’alimentation des bobines fixes
dépend exclusivement de la position de broches d’alimentation, donc de la
position de la source magnétique, mobile.
Exemple :
La position extrême, celle où les deux sources magnétiques sont face
à face n’est pas utilisée. En
effet, celle-ci permet un asservissement en position, par contre, elle nécessiterait une dépense
d’énergie supplémentaire, pour décoller et un temps d’arrêt préjudiciable, au principe de choix d’un moteur avec une accélération maximale.
Il
est donc constaté la rupture de l’alimentation de la source magnétique fixe la
plus proche de la partie mobile
et l’alimentation de la 1ère bobine toute juste voisine de la plus
proche.
A
constater : Les aimants permanents passent devant les bobines fixes et les
chevauchent.

Ce
qui amène un fonctionnement du type de celui, ci-dessous.
Avec q = angle de l’arc maximum, observable entre 2 bobines
du stator.
Ce
qui entrainera une nouvelle attraction (et aussi une répulsion). A chaque commutation, au niveau des broches,
le phénomène se reproduira. Ce qui entrainera un mouvement particulier, où une
source magnétique tentera de rattraper, sans y parvenir totalement, une autre
source mobile qui tente de lui échapper.
L’analogie
la plus parlante serait celle d’un leurre en tissu, censé symboliser un lapin
et qui va courir devant des lévriers.
Au
point de vue lois physiques et magnétiques.
Il
existe une loi magnétique, relative à la force d’attraction ou de répulsion,
produite par deux aimants :
F
= (B1 +B2)² / (4.P.e0 . d²)
B1,
B2 correspondent aux intensités magnétiques des deux aimants.
d²
est la distance linéaire entre les deux aimants
e0 est une
constante fixe, égale à 885 .1012
Ceci sera presque vrai,
car l’estimation est plus complexe, il faudrait tenir comptes des surfaces et
de l’écartement entre les surfaces.
La formule serait plutôt :
F
= k. (B1 +B2)² / (4.P.e0 . d²)
k
serait = 1 si les surfaces se touchent,
k
<1 s’il elles sont plus ou moins éloignées.
Une
« bonne » approximation sera faite
Avec
0,8 <k <1
Un
autre problème sera de retrouver (B1+B2), en fonction de la position, donc de d².
Prenons
une position.
Les
deux sources sont décalées, les
vecteurs le sont aussi, mais ils peuvent être l’un et l’autre, décomposés en
vecteurs élémentaires comprenant une composante verticale et horizontale.
Si l’on analyse les projections des vecteurs, il est possible de constater qu’une partie du vecteur B2 ne participe pas, ou ne participe plus à la création de la force.
Les
vecteurs participants seront : B11 et B23
La formule générale de F produite par une bobine
F
= k . (B1 + B2)² / (4.P.e0 . d²)
où, B1.B2,
correspondent à B11 et B23
Ce
qui amènera à :
F
= k . (B11 + B23)² / (.P.e0 . [r moyen .sin(q)]²)
F
=k . [B1 . sin (q) + B2.
cos (q) . sin (q)
] ² / (4P.e0 . [r moyen .sin (q)]²)
Les
«sin» disparaissent par simplification…………….. !
F = k. [ B1
+ B2 . cos (q)]². / [4P.e0 . (r moyen².]
K
reste le coefficient réducteur lié à l’écartement et la forme des sources
magnétiques.
L’angle
parcouru sera général un peu supérieur à la moitié de l’arc existant entre deux
bobines du stator. Ceci permettra d’éviter que l’aimant permanent du rotor et
la bobine soit en attraction maximale et
qu’un ralentissement soit observé !
Couple produit
·
Moteurs
bipolaires :
Le
couple total sera égal à 2 fois cette expression fois l’écart entre les deux
forces,
Le
couple C = k . 2 . F r moyen Celui-ci
dépendra de q (et donc du
temps)
K
reste le coefficient réducteur lié à l’écartement et à la forme des sources
magnétiques.
C
= k . 2 . [ B1 + B2 . cos (q)]².r
moyen / [4P.e0 . (r moyen².]
=
2. [ B1 + B2 . cos (q)]²/ [4P.e0 . (r moyen.]
C
= (en Nm) = k . 2 . [ B1 + B2 . cos (q)]²/ [4P.e0 . (r moyen.]
Après simplification.
Le
couple C = 2.F. r moyen =
k . [B1 + B2 . cos (q)]²/ [ 2 P . e0 . (r moyen.]
(en Nm)
Avec
0,8 <k <1
·
Moteurs multipolaires.
Le
couple sera fonction du nombre de paires de pôles.(p) et dépendra de q (et donc du temps)
K
reste le coefficient réducteur lié à l’écartement et à la forme des sources
magnétiques.
Le couple C =
2.F. r moyen .p =k .p.2. [ B1 + B2
. cos (q)]²/ [4P.e0 . r moyen.]
(en Nm)
Après simplification.
Le couple C = k . 2.F. r moyen .p =
k .p. [ B1 + B2 . cos (q)]²/ [ 2P . e0 . (r moyen.]
(en Nm)
Avec
0,8 <k <1
·
Variation du couple en fonction de q, pour un bobine de stator étudiée.
·
Le
couple ne sera pas constant.
Cmoyen
@ (C1 + C2 )/ 2
Cmoyen
@ C = (en
Nm)
= k . [ [ B1 + (B2 . cos (0))]²/ [2 P.e0 . (r moyen.]
+ [ B1 + (B2
. cos (q/2))]²/ [2 P.e0 . (r moyen.]
] / 2
Avec
0,8 <k <1
(On
effectue cette approximation, car q est faible, l’erreur est minime. Par contre les
fanatiques matheux peuvent et doivent dégainer Un calcul de moyenne, avec les
intégrales)
K
reste le coefficient réducteur lié à l’écartement et à la forme des sources
magnétiques.
q, correspondra à
un angle qui se calculera en divisant 360° par le nombre de bobines du stator.
q = 360/N bobines
Si l’on prend en compte des autres bobines du stator, celles-ci
vont produire avec les pôles de l’aimant permanent du rotor d’autres éléments
de couple.
Ceci
amènera une ondulation pour le couple en fonction du temps.
Un constat : Plus il y aura de
bobines sur le stator plus les ondulations seront rapides et de faibles
amplitudes.
Calcul des bobinages
Comment calculer le bobinage ?
a)
Il faudra
connaître les deux inductions magnétiques mises en jeu ou possibles.
·
B1 dépendra
du châssis magnétique choisi et de la bobine. Il faudra connaître le maximum
possible sans saturation. Il existe une méthode sur le site « Mistershoeélec »
en catégorie « bobinage ».
·
B2
sera fixe et dépendra des aimants
permanents.
b)
Il faudra aussi
connaître la manière dont le bobinage est réalisé. Dans la plupart des cas, les
moteurs sont bipolaires et les bobines sont groupées en deux ensembles en parallèle, de bobines, elles, reliées en
série.
Exemple : 4 bobines en tout = 2 groupes de 4 bobines. Les 4
bobines sont en série, les 2 groupes sont en parallèle.
Nous
aurons pour une bobine
E = N.(B1 + B2). Lo . n . 2P. R moyen
N= E / (B1 + B2). Lo .
n . 2P.
R moyen
Avec n =
vitesse de rotation de la partie mobile, en tours par seconde.
N = nombre de spires
Lo= longueur de bobine
Rb
= rayon de la bobine
Quelques notions supplémentaires
Magnétismes mis en présence.
·
B2 est produit par un aimant
permanent.
·
B1 est produit par une
bobine « plate »
C'est une bobine beaucoup plus large que longue qui comporte
généralement plus d'une spire et dont l'induction en son centre vaut :
Le problème sera de
connaître I (intensité)
 Si
l’on contourne la difficulté en déterminant
les variations de flux.
Si
l’on contourne la difficulté en déterminant
les variations de flux.
Tension nécessaire
E = N . dj/dt = (B1+
B2 ). Lo . dx/dt
Avec dx/dt = vitesse tangentielle de rotation de l’aimant
permanent = n . 2P. R moyen
n = vitesse de rotation de la partie mobile, en
tours par seconde.
N = nombre de spires
Lo= longueur de bobine
Rb = rayon de la bobine.
Lo . dx = variation
de surface.
La
formule deviendra :
E = N . dj / dt = (B1+
B2 ). Lo. dx/dt = N . dj/dt = N . (B1+
B2). Lo . n . 2P. R moyen.
E = N.(B1+
B2). Lo . n . 2P. R moyen
Ce qui sera suffisant par un technicien souhaitant calculer un nombre de spires
Intensité consommée
La
bobine « plate » aura pour coefficient d’auto induction L = N . j / I = m0. N² /2Rb
Et e(V) = L di/dt
E = (B1
+ B2). Lo . n . 2P. R moyen = L di/dt
Ce qui implique que si E
est brutalement appliqué et constant ainsi que B1, B2,
i sera de forme affine (c’est un calcul intégral)
Tel que i (t) = E . t / L
I
va progresser le temps d’alimentation d’une bobine et aura la forme suivant.
T sera le temps d’alimentation d’une
bobine. Ce temps sera fonction de la rotation
du rotore et, par la même du temps de commutations des sections par le rotot ce
qui, on le rappelle permet alimentation de l’inducteur du moteur.
·
I moyen = E.T/L/2
·
Si l’on veut I efficace, pour la section des fils = E.T/L/ 1,414
L
= coefficient d’auto induction d’une bobine :
L = (m0. N² /2Rb S surface de la bobine) / L longueur de la bobine (si μ0 et μr
sont connus)
Sinon, la bobine possédera un
coefficient L donné qu’il est possible de mesurer par une méthode
« voltampèremétrique », en alternatif, et continu, par la méthode des
impédances.
Pour trouver Z =
U continu / I continu pour avoir R,
Pour trouver Z
= Ualternatif / I alternatif et continu, par la méthode des impédances.
L = Racine carré de (Z² -R²)/2π.f
Ce qui sera suffisant par un technicien souhaitant calculer un nombre de spires et la section.
Couple et Puissance
mécanique mis en jeu
Cmoyen
(Nm) @ 2. k .F. r moyen . p = p . [ B1
+ B2 . cos (q)]²/ [ 2P . e0 . (r moyen.]
Avec p = nombres de paires de pôles.
K
reste le coefficient réducteur lié à l’écartement et à la forme des sources
magnétiques.
Avec
0,8 <k <1
P (Watts) = 2 . P .n .C
Avec n = vitesse
de rotation en tours/secondes.
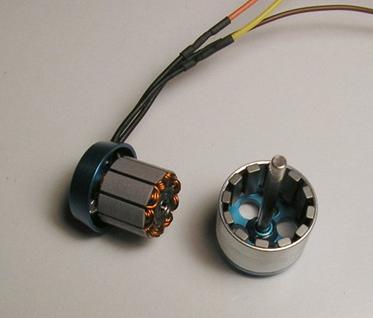
c) Les moteurs sans
balais, de type Brushless.
Ces moteurs sont de type « Radial ».
Il existe deux types de modèles, mais au final, le principe est le même : une source de magnétisme
fixe est mise en confrontation avec une source de magnétisme tournante.
Soit
le rotor est visible de l’extérieur, soit il est disposé de
manière classique.
Il
est généralement constitué d’aimants
permanents, pour les plus modernes et les plus compacts ; ou
d’électro-aimants, pour les plus importants.
Pour
ces derniers, l’alimentation se fait en courant continu et par un jeu de 2
bagues conductrices. Le moteur est plus robuste, mais il a plus d’inertie. Ce
type de moteur fait partie d’un ensemble nommé « Brusless », ou
« Moteur sans balais ».
Le rotor peut constituer la cage extérieure (brushless out-runner).
Une adresse des plus intéressantes pour les amateurs de
modélismes :
http://www.legallou.com/Modelisme/Brushless/IndexBrushless.html
Travail du bobineur :
Refaire si possible et à l’identique, le bobinage
d’une ou de plusieurs bobines sur le stator.
Il est parfaitement déconseillé de ne pas laisser
trainer des outils ou de la limaille sur le rotor sous peine de voir l’ensemble de dé-aimanter.
Le stator peut constituer la cage extérieure (brushless out-runner).
Les
bobines du stator seront alimentées (cas de l’image gauche) :
·
Soit, en courant continu, haché, qui sera fourni par un module électronique de
puissance.
Pour les faibles puissances (<0,1cv), les moteurs prennent
surtout le nom de « moteurs pas à pas », chez les professionnels.
Pour les puissances (>0,1cv), les moteurs prennent surtout le
nom de « Brushless », chez les professionnels.
Les
bobines seront câblées en étoile. Le module d’alimentation
disposera d’autant de phase qu’il y aura de bobines. Le moteur pourra être
couplé avec un capteur rotatif, ce qui permettra un asservissement de position.
Le
rotor sera exclusivement constitué d’aimants permanents.
·
Soit
en courant alternatif sinusoïdal polyphasé. (Cas de l’image de droite). L’ensemble
prendra surtout le nom de machines auto synchrones chez les professionnels. Ce sera généralement des
moteurs asynchrones à rotor bobiné (6 bobines) qui seront utilisés. Dans ce cas
le moteur sera alimenté au démarrage, comme un moteur
asynchrone classique avec les bobines des électroaimants du stator monté en
étoile, non alimentées et en court-circuit. Lorsque le moteur sera lancé et que
la vitesse sera maximale, il conviendra d‘alimenter les bobines en courant
continu. Le rotor va accrocher le champ tournant et la vitesse du rotor
deviendra égale à la vitesse du synchronisme du moteur. La machine tournera
alors de manière dite « synchrone ». Il sera possible de faire varier
la vitesse du moteur, en usant d’un variateur de fréquence.
Principes physiques et formules pour un moteur à rotor extérieur
(brushless out-runner).
Principe de fond :
Une
bobine fixe va brutalement produire un champ magnétique de type
« continu », au voisinage d’une source d’aimantation complémentaire,
qui elle peut-être mobile.
S’il
existe un décalage de position entre les deux sources magnétiques, alors la
source mobile va être attirée selon la règle du flux maximal.
Il
sera possible qu’il y ait une répulsion, car l’alimentation des bobines fixes
dépend exclusivement de la position de broches d’alimentation, donc de la
position de la source magnétique, mobile.
Exemple :
Le moteur pourra avoir deux statuts :
·
En rotation. Il fonctionnera
comme un moteur classique, la vitesse dépendra de la fréquence de l’horloge de
commande du module électronique de l’alimentation.
·
Statique, sur une
position choisie, si l’on bloque à 0, la fréquence de l’horloge de commande du
module électronique de l’alimentation.
Remarque :
La position extrême, où les deux sources magnétiques sont face à face, peut être
utilisée. En
effet, celle-ci permet un asservissement en position, par contre elle nécessite
une dépense d’énergie supplémentaire, pour décoller et un temps d’arrêt. Dans
ce cas Le moteur de comporte comme un moteur dit « Pas-à- pas »
Les aimants fixes et les électroaimants vont respectivement
présenter un flux magnétique, caractérisé par une présentation axiale. Ce flux est constant
quelque soit l’importance de la surface.
Il est par contre nécessaire de connaître les surfaces mise en
jeu, dans la génération de ce flux.
L’alimentation
des bobines sera réalisée par un circuit électronique de puissance. Celui-ci
alimentera de façon séquentielle chacune des bobines du stator central.
Avec q = angle de l’arc maximum, observable entre 2 bobines
du stator.
Ce
qui entrainera une nouvelle attraction (et aussi une répulsion). A chaque changement dans l’alimentation des bobines
(phases) le phénomène se reproduira. Ce qui entrainera un mouvement
particulier, où une source magnétique tentera de rattraper, sans y parvenir
totalement, une autre source mobile qui tente de lui échapper.
Au
point de vue lois physiques et magnétiques.
Il
existe une loi magnétique, relative à la force d’attraction ou de répulsion,
produite par deux aimants :
F
= (B1 + B2)² / (4.P.e0 . d²)
B1,
B2 correspondent aux intensités magnétiques des deux aimants.
d²
est la distance linéaire entre les deux aimants
e0 est une
constante fixe, égale à 885 .1012
Ceci sera presque vrai,
car l’estimation est plus complexe, il faudrait tenir comptes des surfaces et
de l’écartement entre les surfaces.
La formule serait plutôt :
F
= k. (B1 +B2)² / (4.P.e0 . d²)
k
serait = 1 si les surfaces se touchent.
k
<1 s’il elles sont plus ou moins éloignées.
Le
problème consistera à retrouver B1+B2 , en fonction de la
position donc d².
Prenons une position.
Les
deux sources sont décalées, les
vecteurs le sont aussi, mais ils peuvent être l’un et l’autre, décomposés en
vecteurs élémentaires comprenant une composante verticale et horizontale.
Si l’on analyse les projections des vecteurs, il est
possible de constater qu’une partie du vecteur B2 ne participe pas,
ou ne participe plus à la création de la force.
Les
vecteurs participants seront : B11 et B23
La formule générale de F produite par une bobine
F
= (B1 + B2)² / (4.P.e0 . d²)
où, B1 + B2,
correspondent à B11 et B23
Ce
qui amènera à :
F = (B11 + B23)²
/ (.P.e0 . [r .sin(q)]²)
F
= [B1 . sin (q) + B2.
cos (q) . sin (q)
]² / (4P.e0 . [r.sin (q)]²)
Les
« sin » disparaissent par simplification…………….. !
F = k. [ B1
+ B2 . cos (q)]². / [4P.e0 . r ².]
K
reste le coefficient réducteur lié à l’écartement et la forme des sources
magnétiques.
L’angle
parcouru sera général un peu supérieur à la moitié de l’arc existant entre deux
bobines du stator. Ceci permettra d’éviter que l’aimant permanent du rotor et
la bobine soit en attraction maximale et
qu’un ralentissement soit observé !
Travail du bobineur :
Refaire si possible et à l’identique, le bobinage
d’une ou de plusieurs bobines sur le stator.
Il est parfaitement déconseillé de bricoler le rotor
sous peine de voir l’ensemble de dé-aimanter.
S’il
faut, maintenant, quelques théories, ou « Comment calculer
le bobinage ? »
Tension nécessaire pour une bobine inductrice.
a)
Il faudra
connaître les deux inductions magnétiques mises en jeu ou possibles.
·
B1 dépendra
du châssis magnétique choisi. Il faudra connaître le maximum possible sans
saturation et de la bobine de phase. Il existe une méthode sur le site « Mistershoeélec »
en catégorie « bobinage ».
·
B2
sera fixe et dépendra des aimants
permanents.
E = N.(B1+
B2). Lo . n . 2P. R
Avec :
E
= tension maximum imposée à la bobine inductrice.
dx/dt
= vitesse tangentielle de
rotation de l’aimant permanent = n . 2P. R
n = vitesse de rotation de la partie mobile, en
tours par seconde.
N = nombre de spires
Lo = longueur de bobine, en m.
R = Rayon du rotor ou de
la roue polaire, en m
Ce qui sera suffisant par un technicien souhaitant calculer un nombre de spires
Intensité dans une bobine.
·
I moyen
= E.T/L/2
·
Si l’on veut I efficace, pour
la section des fils = E.T/L/ 1,414
L
= coefficient d’auto induction d’une bobine :
L = (
μ0 . μr . N² . S surface de la bobine)
/ L longueur de la bobine
(si μ0 et μr sont connus)
Sinon, la bobine possédera un
coefficient L donnée qu’il est possible de mesurer par une méthode
« voltampèremétrique », en alternatif, et continu, par la méthode des
impédances.
Pour trouver Z =
U continu / I continu pour avoir R,
Pour trouver Z
= Ualternatif / I alternatif et continu, par la méthode des impédances.
L = Racine carré de (Z² -R²)/2π.f
Ce qui sera suffisant par un technicien
souhaitant calculer un nombre de spires
et la section.
Couple et forces produites :
a) Couple produit en rotation.
·
Moteur avec
une seule bobine seule, alimentée :
Cmoyen
@ k .
[(B1 + (B2. cos (q))² + (B1 + (B2.)²] / (4 . P.e0
. r)
Avec
0,8 <k <1
K
reste le coefficient réducteur lié à l’écartement et à la forme des sources
magnétiques.
·
Moteur avec
plusieurs bobines alimentées en même temps bobine (Nbob) :
Cmoyen
@ k . Nbob . [(B1 + (B2.
cos (q))² + (B1 + (B2.)²] / (4 . P.e0
. r)
Avec
0,8 <k <1
K
reste le coefficient réducteur lié à l’écartement et à la forme des sources
magnétiques.
b) Force de contact.
Elle
dépend exclusivement des intensités magnétiques de l’aimant permanent et de
l’électroaimant et de la surface d’exposition.
F
= (B1 + B2)² x Surface en contact) / (2 x m0) 1
S en m²
F en Newtons
F = (B1
x B2 x S) / (2 x m0)
c) Nombre de saut, ou de pas.
Le
nombre de positions obtenues sera égal au produit nombre de bobines
inductrices par nombre de pôles des aimants permanents.
d) L’angle
parcouru par « pas »
Il sera
égal à 360° / nombre de pas
Explications
·
Moteurs
avec une seule bobine seule, alimentée :
Le
couple total sera égal F fois l’écart entre l’application de la force et le rayon
du rotor,
Le
couple C = F r
=
k . (B1 + (B2. cos (q))² .r / (4P.e0 . [r]²)
(en Nm)
Après
simplification.
C = k . (B1
+ (B2. cos (q))² / (4 . P.e0 .r) (en Nm)
·
Moteurs
multipolaires.
Le
couple sera fonction du nombre de bobines alimentées (Nbob). Ce
nombre sera pair.
Le
couple C = F . rayon
C @ k .Nbob . [(B1 + (B2.
cos (q))² + (B1 + (B2.)²] / (8. P.e0
. r) (en Nm)
Avec
0,8 <k <1
K
reste le coefficient réducteur lié à l’écartement et à la forme des sources
magnétiques.
·
Variation
du couple en fonction de q, pour un bobine de stator étudiée.
Déroulement du temps
![]()
Le
couple en rotation, ne sera pas constant et va augmenter, par contre lorsque les aimants seront
face à face. Il n’y aura plus de couple, ni d’attraction, ni de répulsion.
Le rotor sera littéralement collé, par une force de contact, s’il n’y a plus de
changement d’alimentation de phase.
F
= (B1 +B2)² x Surface en contact / (2 x m0)
S en m²
F en
Newtons
Pour
une bobine seule, alimentée :
Cmoyen @ (C1 +C2)/2
@ k [(B1 +
(B2. cos (q))² + (B1 + (B2.
cos (0))²] / (4 . P.e0 . r)/2
@ k [(B1 +
(B2. cos (q))² + (B1 + (B2.)²]
/ (4 . P.e0 . r)/2
@ k [(B1 +
(B2. cos (q))² + (B1 + (B2.)²]
/ (4 . P.e0 . r)
Cmoyen @ k . [(B1
+ (B2. cos (q))² + (B1 + (B2.)²] / (4 . P.e0
. r)
Avec
0,8 <k <1
K
reste le coefficient réducteur lié à l’écartement et à la forme des sources
magnétiques.
Si
plusieurs bobines sont alimentées en même temps bobine seule, alimentée :
Cmoyen
@ (C1 +C2)/2
@ k .Nbob .
[(B1
+ (B2. cos (q))² + (B1 +
(B2. cos (0))²] / (4 . P.e0 . r)/2
@ k .Nbob . [(B1 + (B2.
cos (q))² + (B1 + (B2.)²] / (4 . P.e0
. r)/2
@ k .Nbob . [(B1 + (B2.
cos (q))² + (B1 + (B2.)²] / (8. P.e0
. r)
(On
effectue cette approximation, car q est faible, l’erreur est minime. Par contre les
fanatiques matheux peuvent et doivent dégainer leur artillerie lourde. A
svoir :un calcul de moyenne, avec les intégrales)
Si
l’on prend en compte des autres bobines du stator, celles-ci
vont produire avec les pôles de l’aimant permanent du rotor d’autres éléments
de couple.
Ceci
amènera une ondulation pour le couple en fonction du temps
Un constat : Plus il y aura de
bobines, plus, l’inertie nivellera le tout. Les ondulations seront rapides et
de faibles amplitudes.
Force produite en contact.
Elle
dépend exclusivement des intensités magnétiques de l’aimant permanent et de
l’électroaimant et de la surface d’exposition.
F
= (B1 +B2)² x Surface en contact / (2 x m0)
S en m²
F en Newtons
F = (B1
+ B2)² x S / (2 x m0)
- Les
moteurs pas à pas.
1. Le principe est pratiquement le même que
celui des moteurs « Brusless »
·
Un champ magnétique tournant est générée par des bobines fixes,
alimentées séquentiellement par un dispositif électronique. Le dispositif électronique
est piloté par un signal d’horloge dont la fréquence impose la vitesse de
rotation du moteur.
·
Le champ magnétique tournant circule au voisinage du rotor. Celui-ci va
selon sa conception, être attiré, ou entrainé,
ou accroché, par le champ tournant.
·
Si le champs ne tourne plus, mais est maintenu, le rotor sera bloqué en
une position donnée.
·
S’il n’existe plus de champ du tout, alors le rotor sera libre et ne
subira que des contraintes venant de l’extérieur.
2. Travail du bobineur :
Refaire si possible et à l’identique, le bobinage
d’une ou de plusieurs bobines sur le stator.
Il est parfaitement déconseillé de bricoler le rotor
sous peine de voir l’ensemble de dé-aimanter.
Globalement,
il existe trois types matériels de moteurs.
·
Les moteurs à reluctance variable. Ils ont le rotor constitué
d’éléments en fer doux, qui permettent et favorise, la conduction du flux
magnétique, selon les règle du flux maximum.
- Les
moteurs à aimants permanents. Ils ont le rotor constitué d’une certaine
quantité d’aimants permanents, ce qui génère des forces d’attraction ou
de répulsion en fonction des pôles mis en présence.
- Les moteurs hybrides. Ils combinent les deux principes précédents Ils ont
le rotor constitué d’une seule
paire d’aimants permanents, Par
contre par un jeu de peignes on reconstitue artificiellement, le nombre
de paires de pôles que l’on désire. Il
est totalement déconseillé de démonter les éléments du rotor, sous peine
de détruire le magnétisme.
Nombres de pas = nombres bobines du stator x
nombres des pôles rotor.
Angle par pas = 360 / Nombre de pas
3.
La
commande et l’alimentation en énergie de ces moteurs.
·
Elle s’effectue grâce
à un module électronique de puissance.
·
Ces derniers
fourniront selon les modèles, l’alimentation des bobines de phases qui
produisent le champ magnétique tournant.
·
Les bobines de
phases sont câblées en étoile.
·
L’ensemble sera cadencé
avec un signal d’horloge dont la fréquence sera multiple de la vitesse de
rotation.
·
Il sera en
général possible de changer le sens de rotation en modifiant un niveau logique,
sur une entrée spécifique. Le niveau s’effectuera en TBT 1 = tension ; 0 = absence de tension
4.
La génération
du champ tournant.
Selon le moteur, elle s’effectuera de 4 manières différentes.
·
En
pas entier, excitation normale.
Les bobines sont alimentées par paire. On permute
l’alimentation dans une seule bobine à la ; le couple est optimum.
·
En
pas entier, excitation pleine onde
Une bobine sur deux est alimentée,
le couple est deux fois plus faible, que dans les cas précédent, la puissance
aussi, mais la commande est plus simple.
·
Commande en
demi-pas.
C'est une combinaison des deux modes
précédents.
Le rotor se déplacera, demi-pas, par demi-pas, la vitesse sera la moitié de celle constatée dans les deux cas
précédents.
La puissance et le couple seront intermédiaires aux moteurs précédents.
·
Commande
en micro pas.
Les bobines seront alimentés avec des courants analogiques variables identiques en formes, mais déphasés d’un
angle égal au
décalage existant entre les
deux bobines.
Les courants sont généralement de l’alternatif
sinusoïdal.
Ces deux courants vont induire un champ magnétique
tournant, dont l’étude plus approfondie donnerait la relation bien connue des
électriciens bobineurs :;
f fréquence en Hertz = p paires de
pôles . n vitesse de synchronisme en tours /secondes
Si la fréquence est asservie au démarrage du moteur
par un module électronique, on obtient au final, une
machine synchrone !
Si la fréquence n’est pas asservie, le moteur « démarre comme, il peut »,
c'est-à-dire :
·
si le couple au démarrage est trop faible, le rotor, ne pourra pas
accrocher le champ tournant. Le moteur
ne démarrera pas !
·
S’il démarre, la vitesse va se stabiliser.
Au final on obtiendra encore, une machine
synchrone
Un exemple :
f = p . n
p = 2 paires de pôles
Si f = 50 Hz
Alors, n = 50 / 2
= 25 tours/ seconde =1500 t / minute
5.
Calculs
des bobines.
Travail du bobineur :
Refaire si possible et à l’identique, le bobinage d’une ou de
plusieurs bobines sur le stator.
Il est parfaitement déconseillé de bricoler le rotor
sous peine de voir l’ensemble de dé-aimanter.
S’il faut, quelques théories, ou
« Comment
calculer le bobinage ? »
Tension nécessaire pour une bobine inductrice.
b)
Il faudra
connaître les deux inductions magnétiques mises en jeu ou possibles.
·
B1 dépendra
du châssis magnétique choisi. Il faudra connaître le maximum possible sans
saturation et de la bobine de phase. Il existe une méthode sur le site
« Mistershoeélec » en catégorie « bobinage ».
·
B2
sera fixe et dépendra des aimants
permanents.
E = N.(B1+
B2). Lo . n . 2P. R
Avec :
E
= tension maximum imposée à la bobine inductrice.
dx/dt
= vitesse tangentielle de
rotation de l’aimant permanent = n . 2P. R
n = vitesse de rotation de la partie mobile, en
tours par seconde.
N = nombre de spires
Lo = longueur de bobine, en m.
R = Rayon du rotor ou de
la roue polaire, en m
Ce qui sera suffisant par un technicien souhaitant calculer un nombre de spires
Intensité dans une bobine.
·
I moyen
= E.T/L/2
·
Si l’on veut I efficace, pour
la section des fils = E.T/L/ 1,414
L
= coefficient d’auto induction d’une bobine :
L = (
μ0 . μr . N² . S surface de la bobine)
/ L longueur de la bobine
(si μ0 et μr sont connus)
Sinon, la bobine possédera un
coefficient L donnée qu’il est possible de mesurer par une méthode
« voltampèremétrique », en alternatif, et continu, par la méthode des
impédances.
Pour trouver Z =
U continu / I continu pour avoir R,
Pour trouver Z
= Ualternatif / I alternatif et continu, par la méthode des impédances.
L = Racine carré de (Z² -R²)/2π.f
Ce qui sera suffisant par un technicien souhaitant calculer un nombre de spires et la section.
Puissance absorbée d’une bobine.
Pmoyen
= U moyen . I moyen = E . E.T/L/2
Remarque : Il faudra
connaître le mode de fonctionnement du module d’alimentation pour savoir le nombre
de bobine alimentée en même temps. Ceci permettra de calculer la puissance
totale, absorbée par le moteur.
Putile (Watts) = 2 . P .n .C ≈ Pabsorbée (au rendement près)
Sinon,
au pire le rendement sera égal à 80 %
Ce
qui donnerait, Putile (Watts) = 2 . P .n .C/ 0,8
Avec n = vitesse
de rotation en tours/secondes = K . f
(f = fréquence de commande du module d’alimentation
des phases du moteur.)
Force de contact.
Elle
dépend exclusivement des intensités magnétiques de l’aimant permanent et de
l’électroaimant et de la surface d’exposition.
F
= (B1 + B2)² x Surface en contact) / (2 x m0) 1
S en m²
F en Newtons
F = (B1
x B2 x S) / (2 x m0)
Vérification des formules :
1.
Pour E (Volts)
Nous
aurons pour une bobine :
E= N. dΦ/dt
Avec
Φ (flux magnétique = B x surface), qui dépendra de B1
et B2 et de la surface mise en exposition de magnétisme.
La
surface va varier, avec la rotation
· B2
est
produit par un aimant permanent.
· B1
est
produit par une bobine « longue »
C'est une bobine beaucoup
plus longue que large. Elle se nomme
solénoïde. Elle comporte plus d'une spire et dont l'induction en son centre
vaut :
B1
= μ0 . μR . N . I / LB
Avec :
μ0 = Perméabilité
relative de l’air
= 4 .π ; 10-7
μr = Perméabilité
relative du matériau.
N = nombre de spires
(Il n’est pas forcement nécessaire
de connaître ces valeurs, il est possible de les mesurer.)
E = N. dΦ/dt deviendra
N .d (B1+ B2 ). Lo . dx/dt
E = N . dj/dt = (B1+ B2 ). Lo . dx/dt
Avec :
E
= tension maximum imposée à la bobine inductrice.
dx/dt
= vitesse tangentielle de
rotation de l’aimant permanent = n . 2P. R
n = vitesse de rotation de la partie mobile, en
tours par seconde.
N = nombre de spires
Lo = longueur de bobine, en m.
R = Rayon du rotor ou de
la roue polaire, en m.
La
formule deviendra :
E = N . dj/dt = (B1+
B2 ). Lo. dx/dt = N . dj/dt = N . (B1+ B2).
Lo . n . 2P. R
E = N.(B1+
B2). Lo . n . 2P. R
Ce qui sera suffisant par un technicien souhaitant calculer un nombre de spires.
2.
Pour I moyen dans une bobine I (Ampère)
i en
fonction du temps dans une bobine.
Le
solénoïde aura pour coefficient d’auto induction
L = N .
d j / d i (dans
la bobine)
L = coefficient d’auto-induction d’une bobine, en
Henry = μ0.μr
N²/ longueur du soleinoïde
L, en Henry
Avec : d j =(B1+
B2 ). Lo. dx
μ0 = Perméabilité
relative de l’air
= 4 . π .10-7
μr = Perméabilité
relative du matériau.
N = nombre de spires
Et e(V) = N . dj/dt = L di/dt
Ce qui amènera :
E = N .(B1
+ B2). Lo . n . 2P. R = L di/dt
Ce qui implique que si E
est brutalement appliqué et constant (ainsi que B1, B2),
i sera de forme affine (c’est un calcul intégral)
Tel
que i (t) = E . t / L
I
va progresser le temps d’alimentation d’une bobine et aura la forme suivant.
T sera le temps d’alimentation d’une
bobine. Ce temps sera fonction de la fréquence
de pilotage du module d’alimentation du moteur. Ce temps dépendra aussi de la
commande désirée, en pas entier, demi-pas, etc.
La bobine possédera un coefficient L
donnée qu’il est possible de mesurer par une méthode
« voltampèremétrique », en alternatif, et continu, par la méthode des
impédances.
Pour trouver Z =
U continu / I continu pour avoir R,
Pour trouver Z
= Ualternatif / I alternatif et continu, par la méthode des impédances.
L = Racine carré de (Z² -R²)/2π.f
Si l’on veut calculer à condition de posséder les coefficients…
L = ( μ0 . μr . N² . S surface de la
bobine) / L longueur de la bobine
Avec :
μ0 = Perméabilité
relative de l’air
= 4 .π ; 10-7
μr = Perméabilité
relative du matériau.
N = nombre de spires
D’après la courbe de i(t)
I mini = 0
I maxi = E.T/L
Donc I moyen = E.T/L/2
Si l’on veut I efficace, pour la
section des fils = E.T/L/ 1,414
(I efficace (racine carrée de i²
moyen),
Ce qui sera suffisant par un technicien souhaitant calculer la section des spires.
3.
Calcul du couple en fonction du temps.
L’approche est analogue à celle des
moteur « Brusless » par contre le rayon, est moindre.
·
Moteurs
avec une seule bobine seule, alimentée :
Le
couple total sera égal F fois l’écart entre l’application de la force et le
rayon du rotor,
Le
couple C = F r
=
k . (B1 + (B2. cos (q))² .r / (4P.e0 . [r]²)
(en Nm)
Après
simplification.
C
= k . (B1 + (B2.
cos (q))² / (4 . P.e0 .r) (en Nm)
·
Moteurs multipolaires.
Le
couple sera fonction du nombre de bobines alimentées (Nbob). Ce
nombre sera pair.
Le
couple C = F . rayon
C @ k .Nbob . [(B1 + (B2.
cos (q))² + (B1 + (B2.)²] / (8. P.e0
. r) (en Nm)
Avec
0,8 <k <1
K
reste le coefficient réducteur lié à l’écartement et à la forme des sources
magnétiques.
·
Variation
du couple en fonction de q, pour un bobine de stator étudiée.
Le
couple en rotation, ne sera pas constant et va augmenter, par contre lorsque les aimants seront
face à face. Il n’y aura plus de couple, ni d’attraction, ni de répulsion.
Le rotor sera littéralement collé, par une force de contact, s’il n’y a plus de
changement d’alimentation de phase.
F
= (B1 +B2)² x Surface en contact / (2 x m0)
S en m²
F en
Newtons
Pour
une bobine seule, alimentée :
Cmoyen @ (C1 +C2)/2
@ k [(B1 +
(B2. cos (q))² + (B1 + (B2.
cos (0))²] / (4 . P.e0 . r)/2
@ k [(B1 +
(B2. cos (q))² + (B1 + (B2.)²]
/ (4 . P.e0 . r)/2
@ k [(B1 +
(B2. cos (q))² + (B1 + (B2.)²]
/ (4 . P.e0 . r)
Cmoyen @ k . [(B1
+ (B2. cos (q))² + (B1 + (B2.)²] / (4 . P.e0
. r)
Avec
0,8 <k <1
K
reste le coefficient réducteur lié à l’écartement et à la forme des sources
magnétiques.
Si
plusieurs bobines sont alimentées en même temps bobine seule, alimentée :
Cmoyen
@ (C1 +C2)/2
@ k .Nbob .
[(B1
+ (B2. cos (q))² + (B1 +
(B2. cos (0))²] / (4 . P.e0 . r)/2
@ k .Nbob . [(B1 + (B2.
cos (q))² + (B1 + (B2.)²] / (4 . P.e0
. r)/2
@ k .Nbob . [(B1 + (B2.
cos (q))² + (B1 + (B2.)²] / (8. P.e0
. r)
(On
effectue cette approximation, car q est faible, l’erreur est minime. Par contre les fanatiques
matheux peuvent et doivent dégainer leur artillerie lourde. A savoir : un
calcul de moyenne, avec les intégrales)
Si
l’on prend en compte des autres bobines du stator, celles-ci
vont produire avec les pôles de l’aimant permanent du rotor d’autres éléments
de couple.
Ceci
amènera une ondulation pour le couple en fonction du temps.
Un constat : Plus il y aura de
bobines, plus l’effet de l’inertie, nivellera le tout. De même la fréquence
d’alimentation des bobines va jouer et plus celle-ci sera forte, plus le couple
tendra à être constant. La conjonction des deux effets fera que les ondulations
seront rapides et de faibles amplitudes.